
Vehicle Teleoperation: Successive Reference-Pose Tracking to Improve Path Tracking and to Reduce Time-Delay Induced Instability
- Superior Teleoperation Control: SRPT approach significantly reduces cross-track error in vehicle teleoperation, outperforming the classical Smith predictor in challenging conditions like low adhesion roads and aggressive maneuvers.
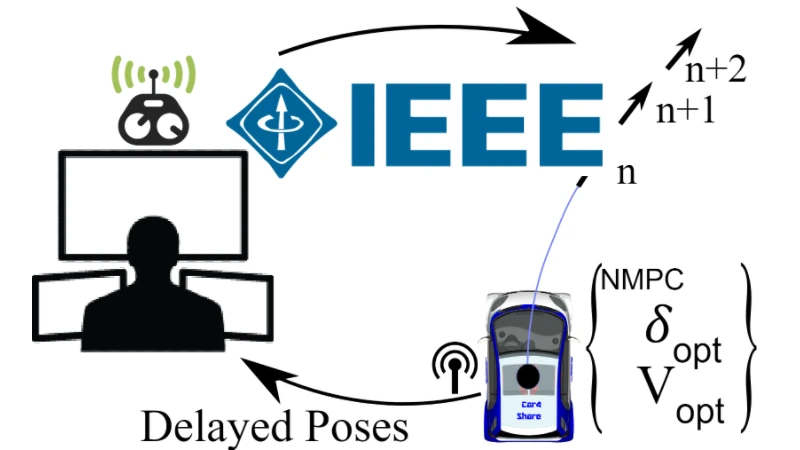
- Efficient Optimization: Utilizes NMPC controller and ACADOS framework for real-time modulation of steering and speed, demonstrating robust performance at 50Hz with mean computation time of 6ms.